Look inside
Specialized Books
Shaping the Future - A Control Architecture for Autonomous Landscaping with an Excavator
Not availableFree shipping
About the book
The main contribution of this thesis is the modelling of an adaptive control architecture for cyclically executed tasks by means of autonomous landscaping for one of the most common class of construction machines on a construction site - an excavator.
The system is capable of solving complex tasks in an autonomous way, including handling possible disturbances and operation constraints which occur during the operation.
ISBN9783843928168
PublisherDr. Hut
Publication Date10/25/16
Pages220
Main GenreSpecialized Books
Sub GenreComputer Science
FormatSoftcover
LanguageEnglish
Price46.30 €

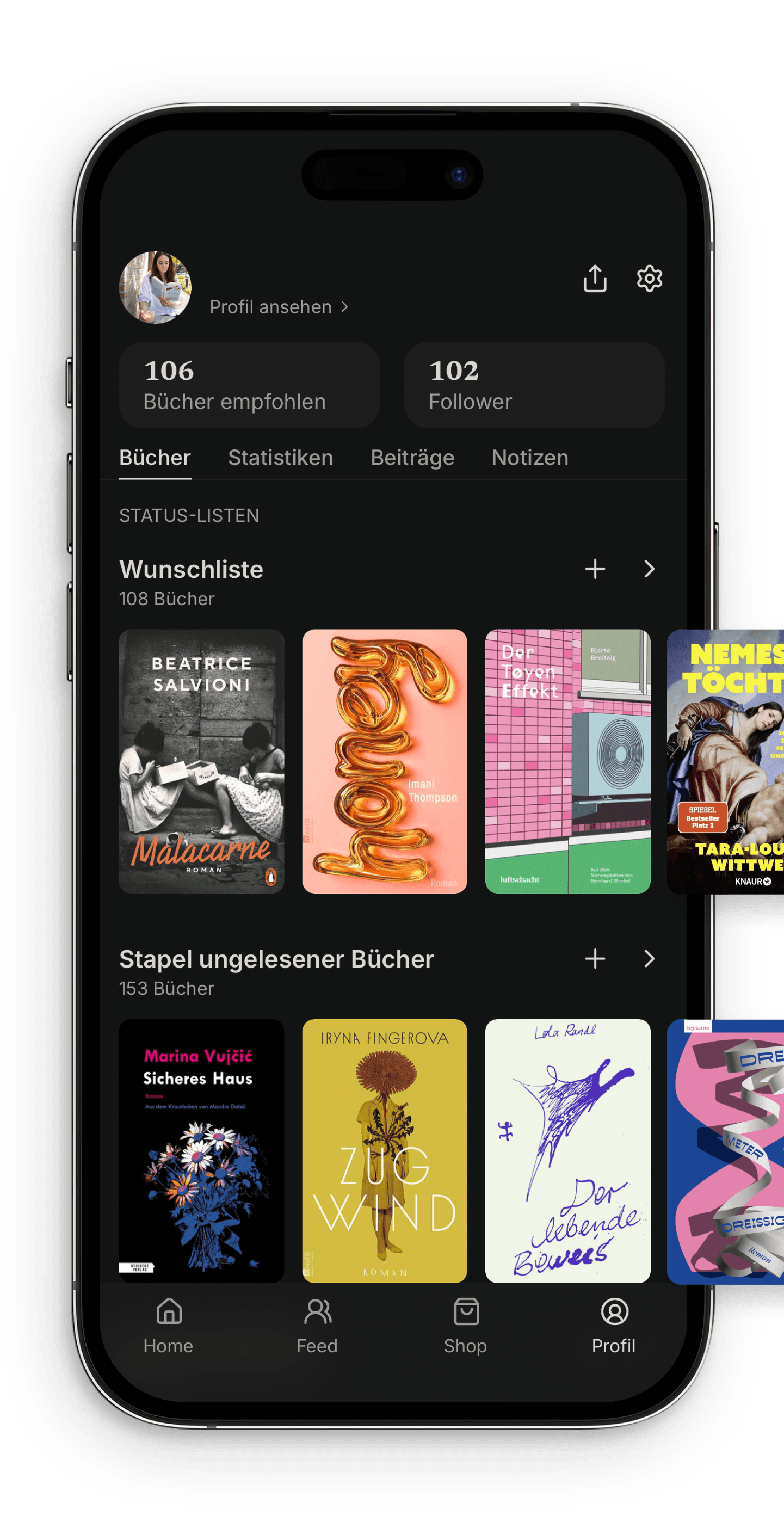
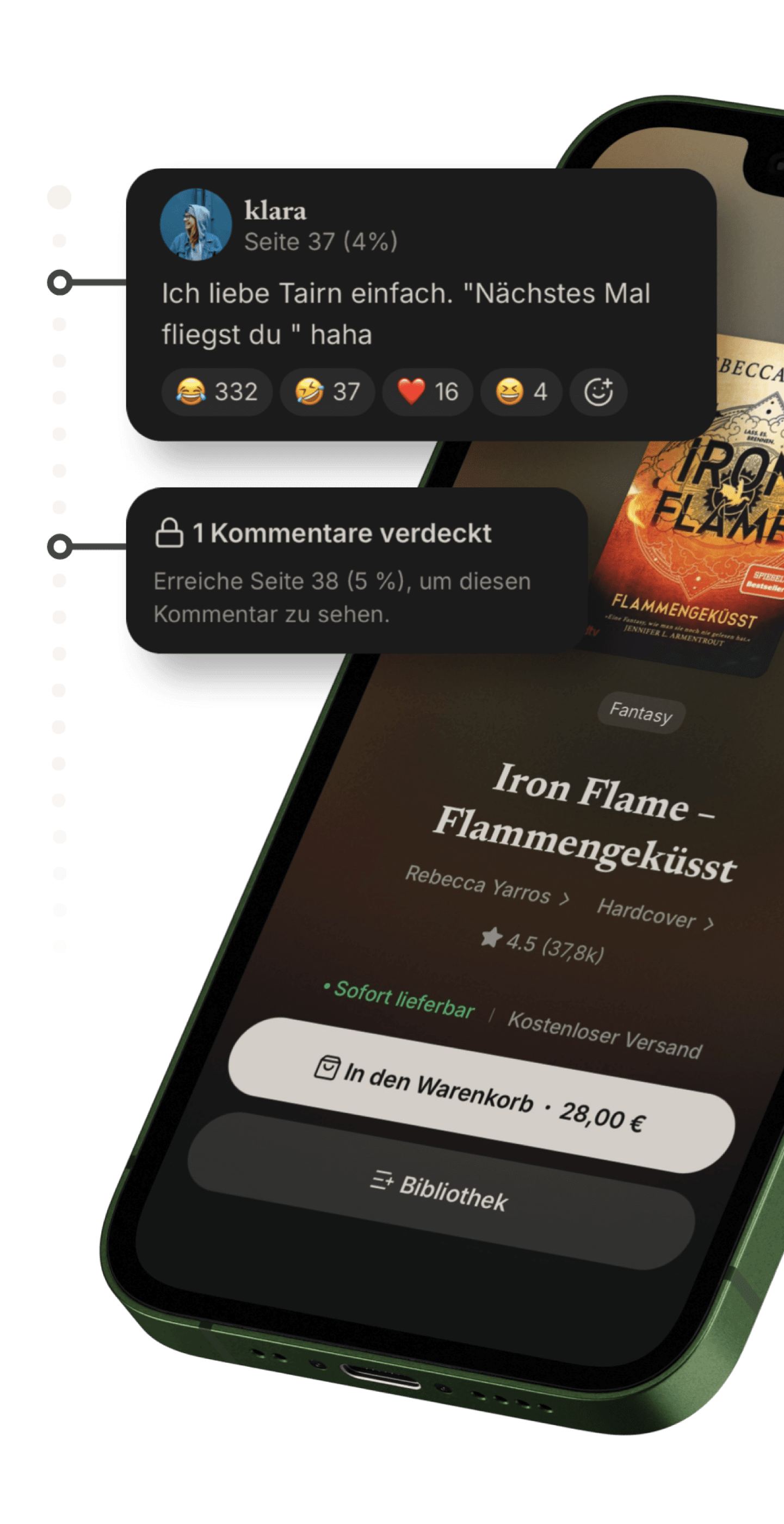
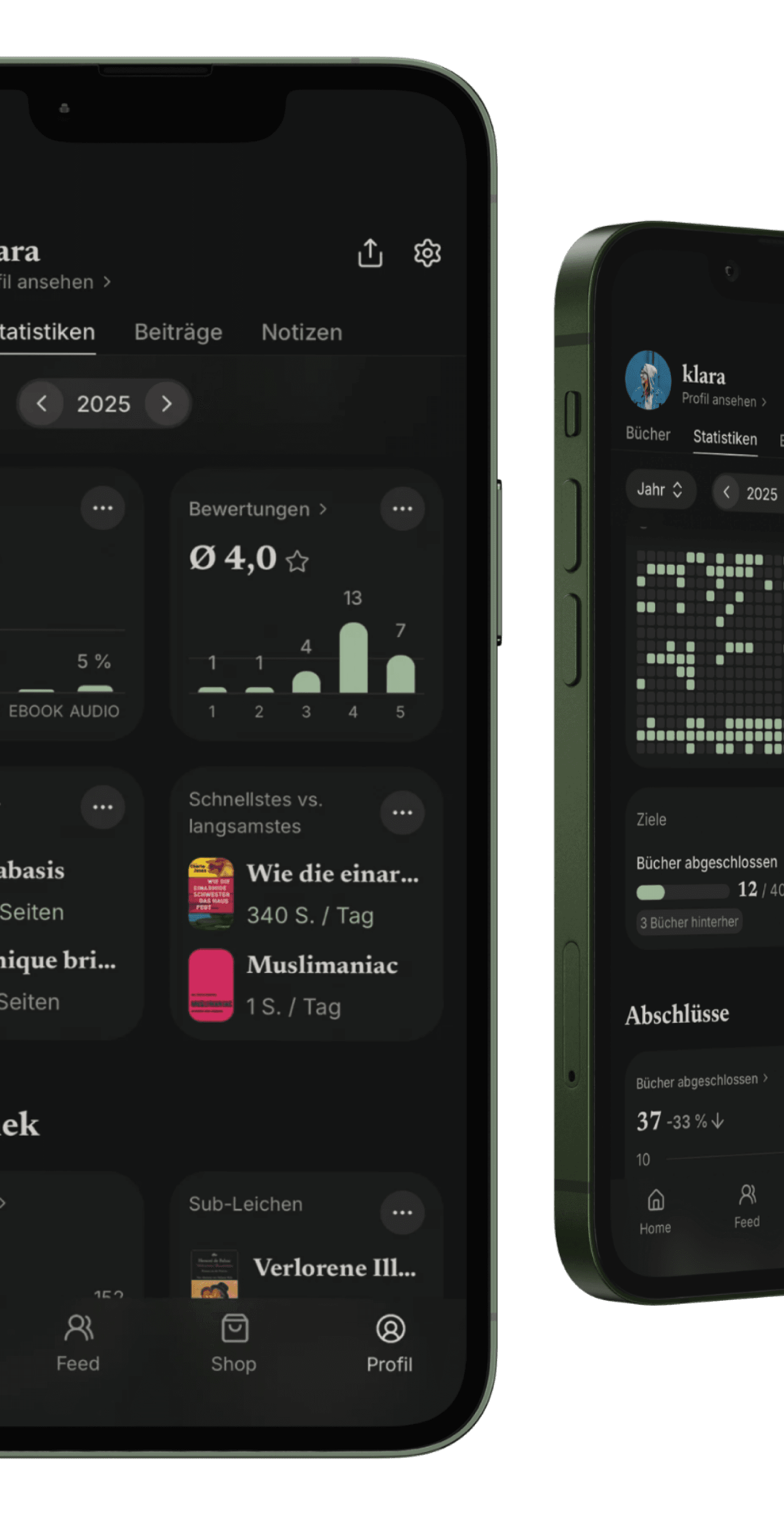
Reading is better with the READO app.
Discover books, track progress, read together.

Library
Keep track