Look inside
Specialized Books
Nonlinear state and parameter estimation of spatially distributed systems
Available nowFree shipping
About the book
In this thesis two probabilistic model-based estimators are introduced that allow the reconstruction and identification of space-time continuous physical systems. The Sliced Gaussian Mixture Filter (SGMF) exploits linear substructures in mixed linear/nonlinear systems, and thus is well-suited for identifying various model parameters. The Covariance Bounds Filter (CBF) allows the efficient estimation of widely distributed systems in a decentralized fashion.
ISBN9783866443709
PublisherKIT Scientific Publishing
Publication Date05/26/09
Pages153
Main GenreSpecialized Books
Sub GenreComputer Science
FormatSoftcover
LanguageEnglish
Price31.80 €

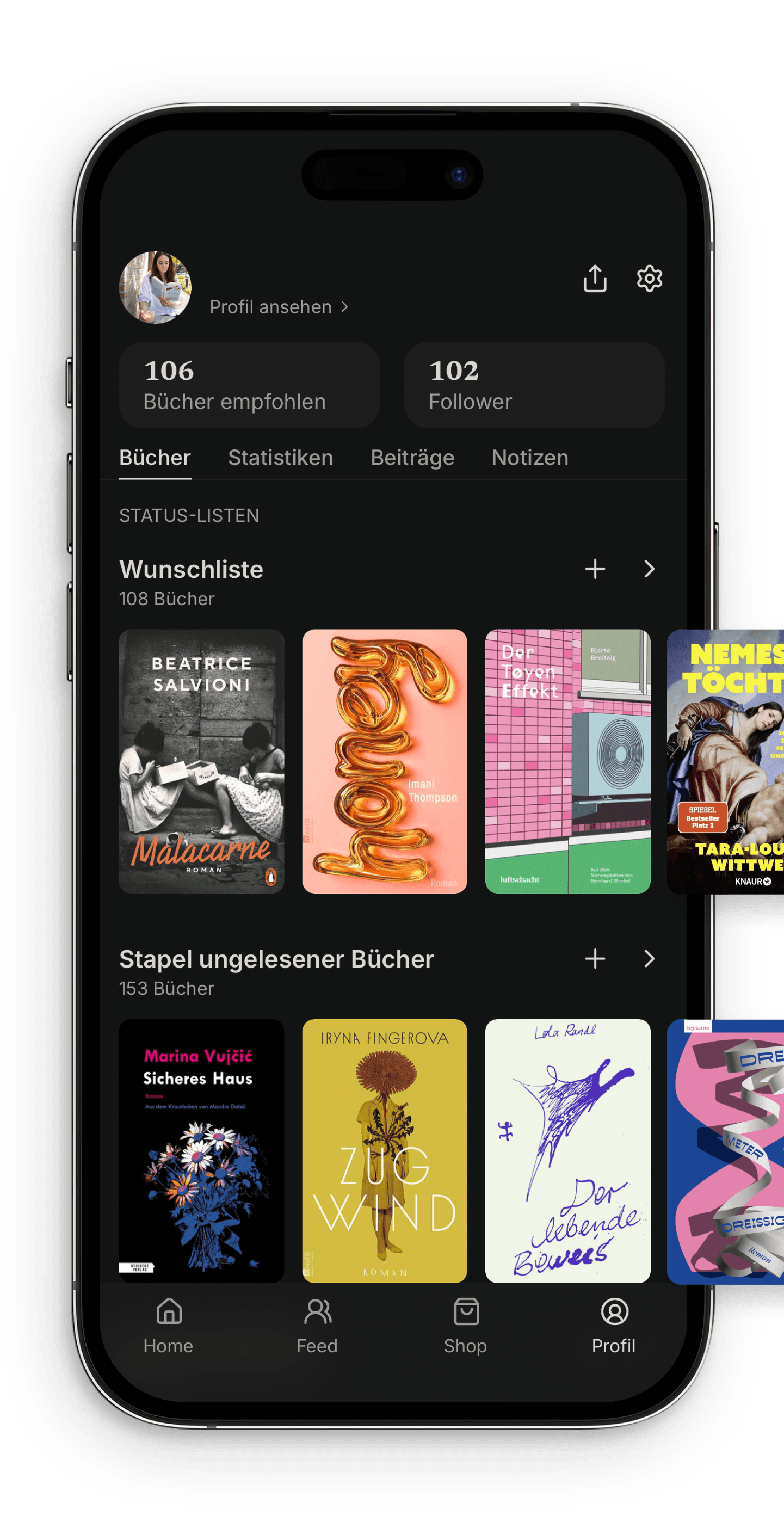
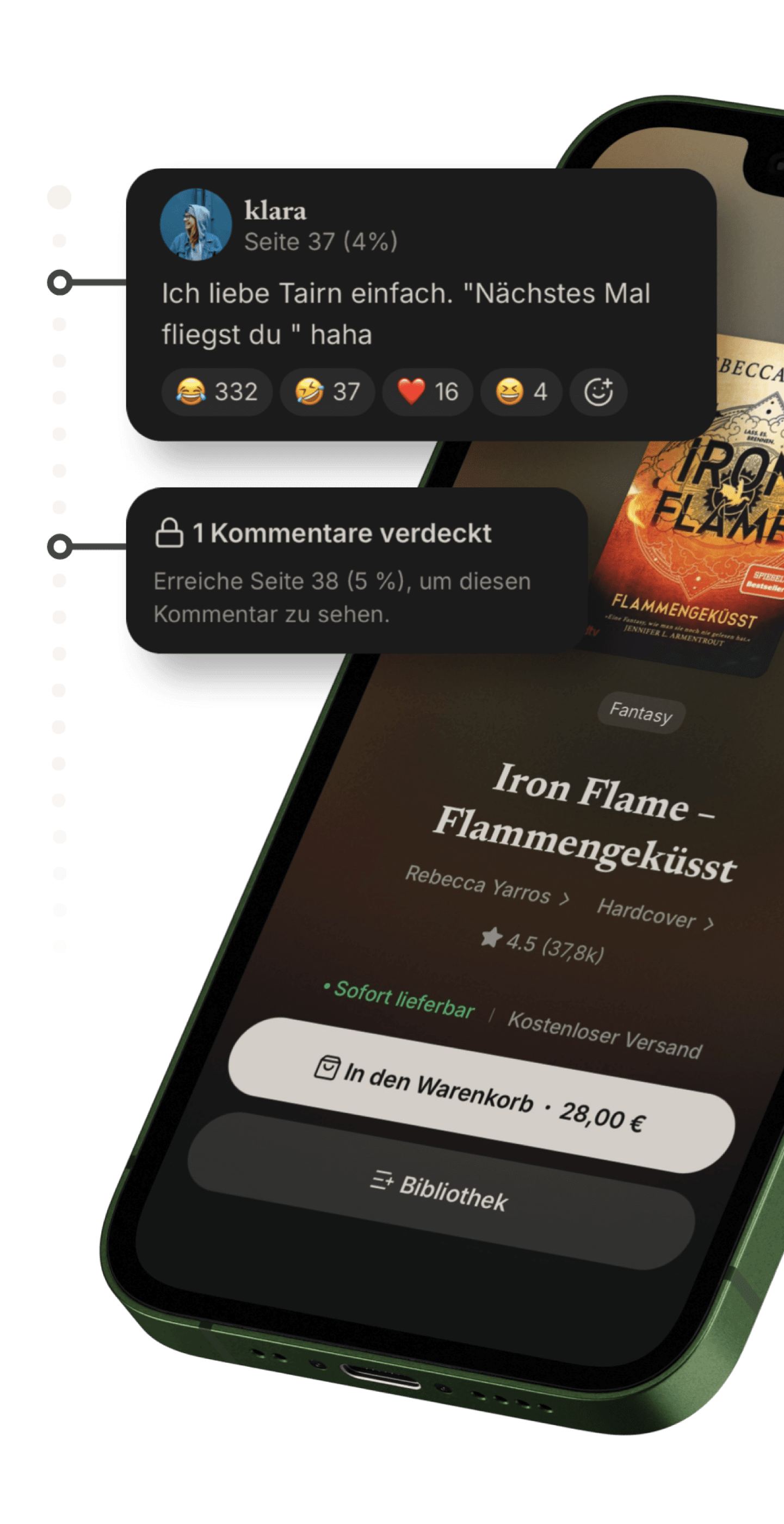
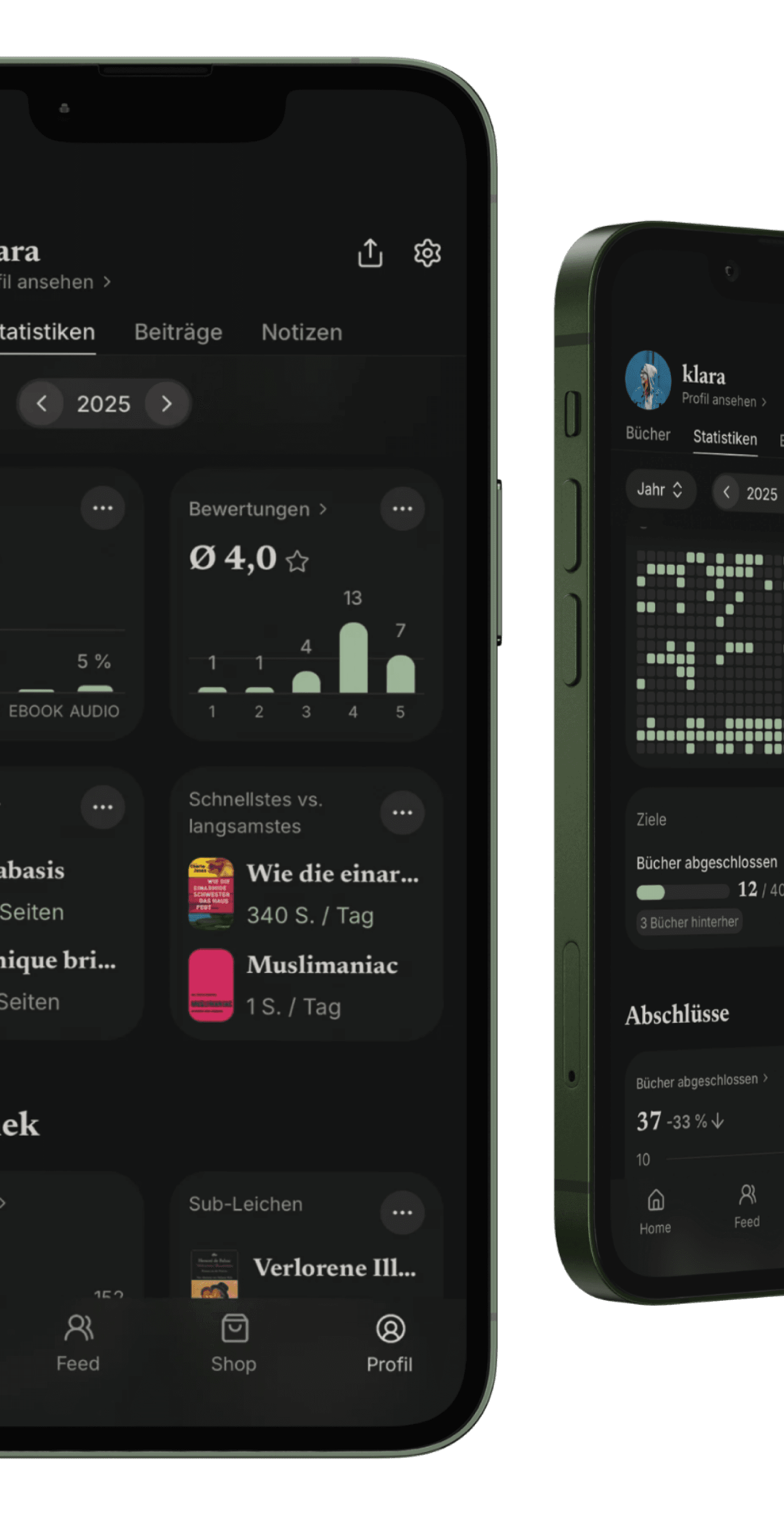
Reading is better with the READO app.
Discover books, track progress, read together.

Library
Keep track