Look inside
Specialized Books
Entwicklung eines hochgenauen Bearbeitungsroboters durch den Einsatz zusätzlicher Messtechnik
Not availableFree shipping
About the book
Der Anspruch an ökoeffizientes Fliegen und ein steigender Bedarf nach Passagierflugzeugen führen bei den Herstellern und Zulieferern zu notwendigen Anpassungen der Fertigungsstrategien von Großstrukturbauteilen, insbesondere durch den weitreichenden Einsatz von Verbundmaterialen. Einen flexiblen Ansatz für die notwendige Bearbeitung stellen Industrieroboter dar, deren Genauigkeitskennwerte derzeit jedoch nicht ausreichen, um den Toleranzen der Luftfahrtindustrie zu genügen. Diese Arbeit untersucht drei unterschiedliche Messsysteme, welche für die Genauigkeitssteigerung eines Industrieroboters genutzt werden können. Dabei wird zwischen internen, abtriebsseitigen Winkelmesssystemen und externen Posemesssystemen, wie einer Stereo-Kamera und einem Lasertracker differenziert. Die so gewonnenen zusätzlichen Messinformationen werden direkt in der Robotersteuerung verarbeitet und erlauben eine Erweiterung der Roboterregelungsstrategie. Die Ergebnisse zeigen deutliche Genauigkeitssteigerungen und Potential für die Großbauteilbearbeitung.
ISBN9783839616000
PublisherFraunhofer Verlag
Publication Date04/15/20
Pages202
Main GenreSpecialized Books
Sub GenreTechnology
FormatSoftcover
LanguageGerman
Price84.80 €

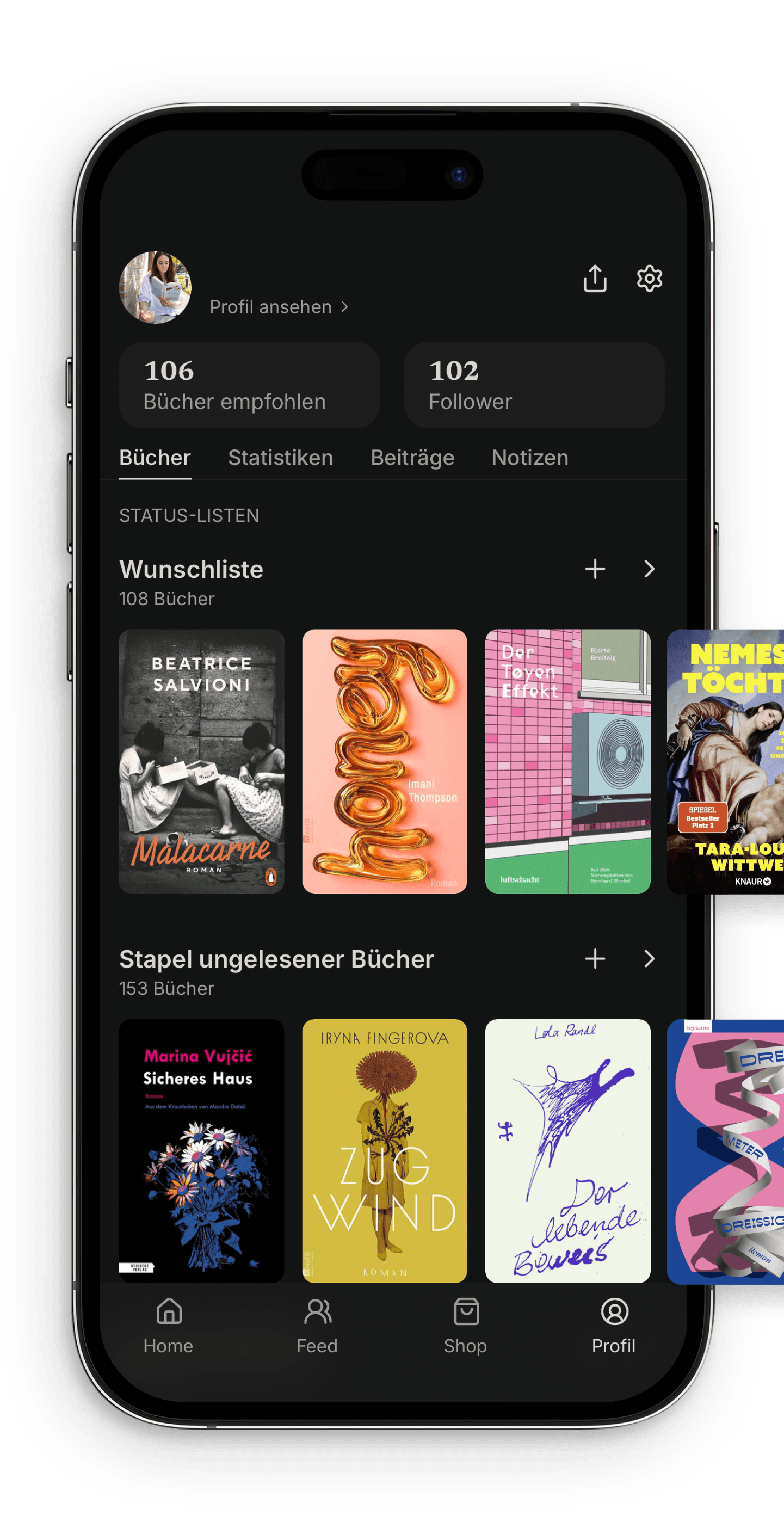
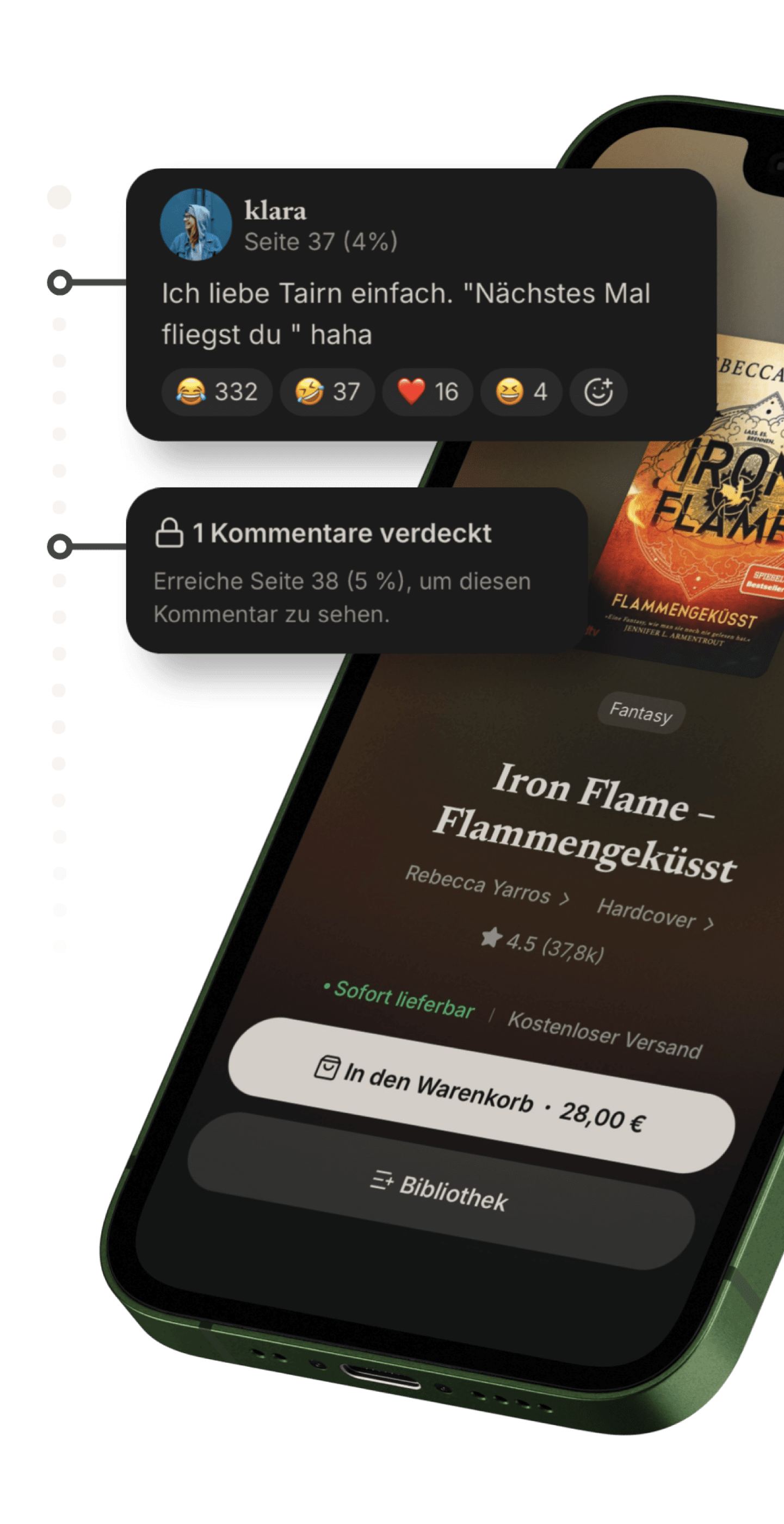
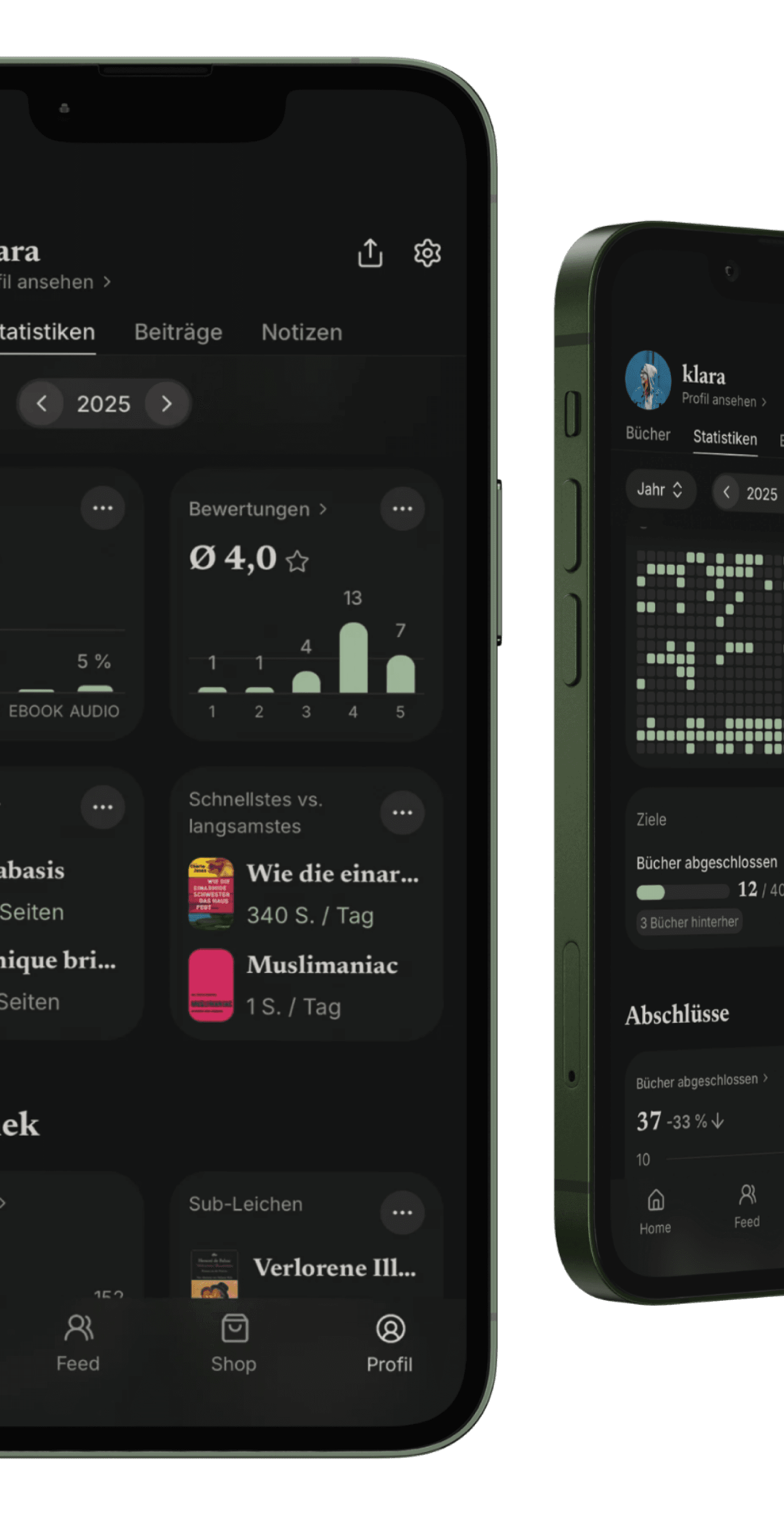
Reading is better with the READO app.
Discover books, track progress, read together.

Library
Keep track